

行業資訊
工業機器人未來往哪走?
工業機器人作為現代工業發展的重要基礎,已經成為衡量一個國家制造水平和科技水平的重要標志。近年來,全球主要經濟體如美國、日本、歐盟紛紛加快推進工業機器人發展和應用步伐,以期在新一輪工業革命中占據制高點,保持或重獲制造業競爭優勢。
工業機器人作為現代工業發展的重要基礎,已經成為衡量一個國家制造水平和科技水平的重要標志。近年來,全球主要經濟體如美國、日本、歐盟紛紛加快推進工業機器人發展和應用步伐,以期在新一輪工業革命中占據制高點,保持或重獲制造業競爭優勢。
專利是技術創新的載體,在當今知識經濟時代,亦是一種戰略性資源,在國際市場競爭中起著重要的作用。專利計量分析是采用數學、統計學研究方法,對來自專利文獻中大量的、零散的專利信息進行提取、整理、加工及組合,并且對其中有價值的情報信息進行定性描述和定量分析,以揭示隱含在其中的技術發展現狀和技術發展趨勢。2016年3月,由中國科學院沈陽自動化研究所、中國科學院文獻情報中心、工業和信息化部電子科學技術情報研究所聯合承擔的工業和信息化部知識產權推進計劃項目—“工業機器人專利態勢分析與風險應對策略研究”順利通過驗收。該項目對工業機器人關鍵技術、重點應用領域、主要競爭區域的技術研發現狀、技術布局開展了全面、深入的剖析,項目成果旨在為政府主管部門把握工業機器人產業發展現狀提供科學依據,為進行工業機器人產業的前瞻性布局提供有效支撐,為制定我國工業機器人發展戰略規劃提供重要的決策依據。同時,也將為我國工業機器人生產和制造企業全面、客觀地了解工業機器人研發和競爭態勢、瞄準市場定位、提升自主創新能力提供重要的參考依據。
本文對項目報告中的核心內容進行重點解讀。

全球概況
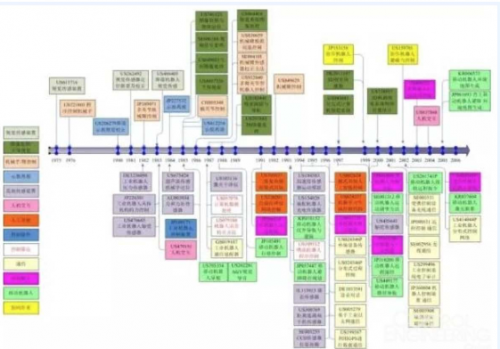
截至2015年11月,工業機器人領域全球專利申請量已高過8萬項。從全球專利申請趨勢來看,工業機器人相關技術的研發、應用經歷了20世紀50~70年代的萌芽期、70~90年代的初步發展期,如今已處于蓬勃發展階段。工業機器人專利申請雖伴有階段性回落,但總體呈現逐步上揚的態勢。
從專利申請(技術來源)、受理(技術流向)區域分布情況看,中國、日本、美國、韓國、德國既是工業機器人技術的研發主體,同時也是全球競爭激烈的五大市場。以日本安川電機(YASKAWA)、日本發那科(FANUC)、瑞士ABB、德國庫卡(KUKA)為代表日企、歐企是工業機器人市場競爭的主角,我國申請人在工業機器人技術研發、產品制造等方面的專利申請量較少,在全球化競爭中處于劣勢。

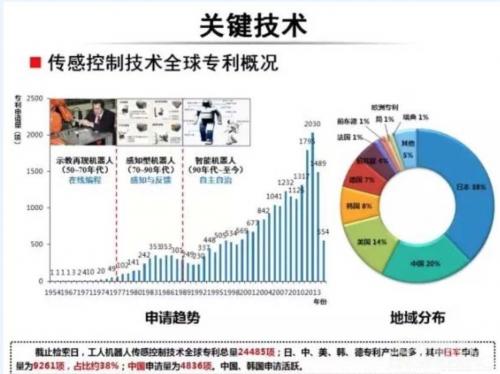
關鍵技術(傳感控制)
傳感、控制系統擔當機器人的“感覺器官”和“大腦”,是機器人智能水平的關鍵所在。傳感控制技術作為工業機器人的核心關鍵技術,其發展歷程伴隨著工業機器人的更新換代:
上世紀50~70年代的機器人屬于示教再現的工作方式。機器人具有記憶和存儲能力,只能按預編程序重復作業,運動控制指令由示教盒或操作者給定。此階段專利申請量較少:1954~1973年間專利申請量總計37項。
70年代后期~90年代,隨著視覺、力覺等傳感技術的融入,機器人對作業環境、作業對象具有一定程度的感知能力,工業機器人的控制方式通常稱為伺服控制。該階段出現了專利申請量的個“馬鞍形”曲線。1983年,工業機器人傳感控制技術全球專利申請量達353項,為該階段歷史峰值。
90年代至今的機器人,被稱為智能機器人,不僅具有比第二代機器人更加完善的環境感知能力,而且還具有類似人的思維、判斷、決策的能力,高度的適應性、自主性是第三代智能機器人的重要標志。2000年以后,工業機器人傳感控制技術領域專利申請一直呈持續增長的態勢,2015年達歷史峰值2030項。可以預測,在未來幾十年,傳感控制技術專利申請量將繼續保持快速增長的趨勢。
截至檢索日,工業機器人傳感控制技術全球專利總量為24485項。其中,日本是專利產出多的國家,占比約38%,中國、美國次之。世界專利申請(WIPO)和歐洲專利申請(EPO)也占一定比例,這在一定程度上反映出發達國家在工業機器人核心關鍵技術上的全球化布局程度較高。
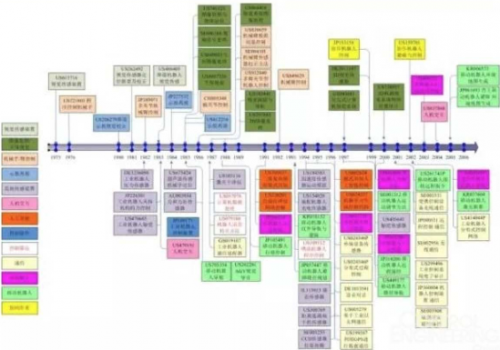
由專利主題聚類圖可以看出,工業機器人傳感控制技術的研發重點包括:
1)綜合類:傳感、測量、控制方法(sensor、detect、controlmethod)、及計算機編程(computer program)、人機交互(userinterface)
2)控制硬件:伺服電機(servo motor);視覺傳感器裝置(camera、image information sensor)
3)控制軟件:數據生成、接收、存儲(signal generate、receive、store);數據通信(communication network);移動機器人控制如導航(guide)、路徑規劃(motionguide、pathplan)、地圖建立(mapplan)。

主題聚類圖也反映了工業機器人的重點應用領域,具體包括:
1)綜合類:自動化生產線(automatic production line)
2)焊接領域:焊炬(weldtorch);焊條、電極等(electrode)。
3)搬運領域:半導體器件如晶圓、液晶面板的運輸、搬運(semiconductor transfer、substrate transfer)
4)裝配領域:印刷電路板(circuitboard)中電子元器件的安裝
5)加工領域:金屬加工(metalcast)、合金線材制造(alloywiremanufacture)
近5年,以自動化生產線為主題的專利聚類愈加密集,反映出工業機器人自動化生產線成套設備已成為自動化裝備的主流。
梳理傳感控制技術發展脈絡如下:
控制技術的演進歷程:在機械結構層面,上世紀90年代前經歷了單機械臂、腕關節、多臂控制等階段。隨著人工智能技術的不斷進步,研發熱點逐步向移動機器人、多機器人系統控制過渡。傳感技術的演進歷程:早期專利主要圍繞視覺、力覺等基本感知能力;隨著工業自動化程度的不斷提升,涌現出各種類型、各種用途的高端傳感器。近年來,傳感控制技術研發較多地集中在通信、協同作業等方向。
總體來看,日本、美國、德國在傳感控制技術領域部署了相當數量的核心專利,對關鍵技術的掌握占據絕對優勢,為競爭對手留下的發展空間有限。
重點產品(焊接、裝配)
截至檢索日,全球范圍內焊接機器人專利申請共計15991項,裝配機器人專利申請共計32584項。從專利申請的地域分布情況看,日本是焊接機器人專利產出多的國家,中國是裝配機器人專利產出多的國家。
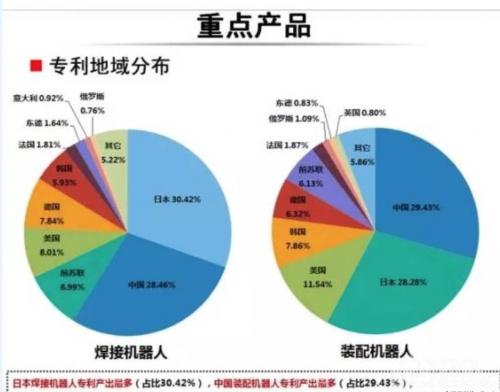
日本在機械手、焊接、控制等技術方向的專利申請具有明顯優勢;中國的專利申請多集中于金屬加工領域;美國、德國在工業機器人多個技術分支上都有一定數量的專利申請,技術布局更加全面、均衡。相比其他國家,美國、德國的工業機器人(包括焊接、裝配等)技術更先進,功能更全面,性能更可靠,精確度、適應性也很強。
根據特定技術類別專利申請量占比,可以發現當前技術創新的熱點。焊接機器人領域,焊接相關技術的研發熱點包括:
1)焊接工藝
焊接工藝相關專利申請量多的技術方向包括:弧焊(電弧焊接,占比38.48%)、點焊(電阻點焊,占比17.17%)、能量束焊接,如激光束焊接(占比12.72%)、火焰焊接(占比2.08%)、等離子焊接(占比1.55%)。釬焊技術專利申請量次于熔焊,占比為4.88%;壓焊技術專利量少,占比僅1.55%。
弧焊是目前機器人自動化焊接中受關注的方向。主要有以下優點:①機械手受控運動方式是連續軌跡控制型,因此運動軌跡的重復精度、焊槍的姿態、焊接參數都有更精確的控制;②弧焊機器人具有可靠的引弧和收弧功能,能夠實時檢測出焊縫偏差,并調整焊接路徑和焊接參數,保證焊接質量的可靠性。弧焊過程中的焊縫跟蹤技術專利申請量多,經過多年的探索和研究,加之智能傳感器(電弧傳感器和光學傳感器)的引入,以及近代專家系統、神經網絡技術的進步,焊縫跟蹤進入了智能控制的新時代。
2)焊接附屬設備
除了焊接機器人本體外,許多外圍輔助設備如控制柜、焊接電源、送絲機構、變位機、夾具等是焊接過程高效率、高質量實施的重要保障。尤其是焊接電源,能直接影響焊接機器人的使用性能。近年來,一些特殊功能的焊接電源,如適合鋁及其鋁合金TIG焊的方波交流電源、帶有專家系統的焊接電源等逐漸受到關注。

裝配機器人領域專利技術集中于機械手,研發熱點包括:
1)程序控制機械手
程序控制機械手相關技術的專利申請約占裝配機器人機械手相關專利申請量的一半(占比46.94%)。其中,以元件定位裝置為特征的(1313項)、以部件結構為特征的(656項)機械手專利申請量較多。此外,還包括以機械臂的坐標特性來描述的機械手,如直角坐標型(426項)、柱面坐標或極坐標型(228項)、多鉸接爪臂或多關節型(667項)。
機械手的驅動方式有液壓式、氣動式、電動式等。液壓驅動精度比較差,而且存在漏油風險,多數工作環境不適用;氣動手爪相對來說比較簡單,價格便宜,因而在一些要求不太高的場合用的比較多;電動手爪造價比較高,主要用在一些特殊場合。從專利申請量來看,電動機械手比較受歡迎。
2)機械手的控制裝置
裝配機器人機械手相關專利申請中,機械手的控制裝置專利申請量占比為23.75%,僅次于程序控制機械手。具體包括讀出裝置(觀察或觸摸裝置)1677項、手柄控制裝置94項、控制臺(如儀表板、開關板)79項、腳操縱的控制裝置7項等。目前,全球各國家/地區正在加大裝配領域工業機器人的研發力度,其中控制技術主要向智能化、多智能體協調控制方向發展。具體包括:開放式、模塊化控制系統;多智能體(multi-agent)協調控制技術。
3)機械手周邊設備
機器手進行裝配作業時,附件或周邊設備如零件供給裝置和工件搬運裝置也至為重要。通常包括零件供給器、臺架、輸送裝置、安全欄等設備。截至檢索日,裝配機器人夾頭、接頭、爪臂、附件及安全裝置等技術分支的申請量總計5830項,占比高達45.5%。

在專利申請人層面,焊接機器人、裝配機器人領域的專利申請以汽車、電子行業頗具實力的全球化企業為主導,近70%來自日本。

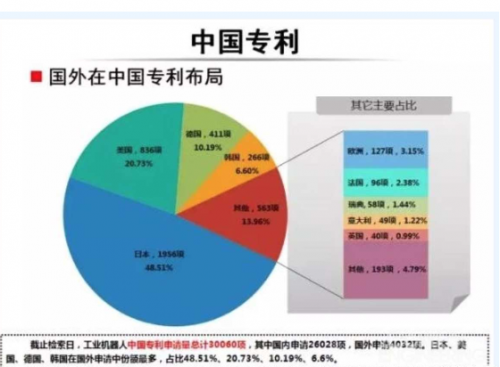
中國專利
截至檢索日,工業機器人中國專利申請總量達30060項。除本國申請外,日本、美國、德國、韓國都把中國視為重要的工業機器人市場,并開展相關技術布局。
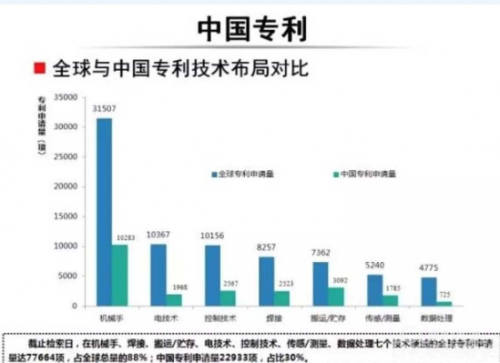
工業機器人專利申請集中在機械手、焊接、搬運/貯存、電技術、控制技術、傳感/測量、數據處理七大技術領域。七個技術領域全球專利申請量達77664項,占全球總量的88%。中國在這七大技術領域的專利申請量為22933項,占全球總量的30%。
全球范圍內機械手、電技術、控制技術領域的專利申請量都高過了1萬項,分別為31507項、10367項、10156項,國外在這三個領域的技術創新方面積累了較為豐富的經驗,發展相對成熟。我國在機械手、電技術、控制技術三大領域的專利申請量分別為10283項、1968項、2567項,發明點多集中在對機械結構、電氣結構的某些小的改進上。
在七個主要技術領域上,中國專利申請量占比多的是搬運/貯存(B65G,42%);申請量占比偏少的是數據處理(15.2%)與電技術(19%)。
工業機器人領域在華專利申請中,國內高校和科研院所的專利申請量占比達一半以上,國外申請人多以企業為主。排名前20位的主要申請人中,日企具有明顯優勢。總部位于臺灣的鴻海集團專利申請量較多,沈陽新松機器人自動化股份有限公司作為國內工業機器人行業的領頭羊企業,亦具有一定的競爭實力。專利申請人的分布情況在一定程度上說明我國的大部分技術掌握在高校和科研院所手中。我國亟需進行產學研結合的模式來促進技術轉移轉化,真正發揮創新價值。

主要國家對比
工業機器人領域專利申請集中在中國、日本、美國、德國、韓國全球五大市場。近五年來,中國專利申請呈爆發式增長趨勢;素有“機器人王國”美稱的日本從上世紀90年代開始至今,專利申請的熱度一直在持續。從全球專利的發源、流向看,日本和美國之間的技術流通為活躍:美國向日本的技術輸出比例為15.14%,日本向美國的技術輸出比例為18.31%。中國向其他國家的技術輸出比例都偏低:中國向美國為1.45%,中國向日本為0.43%、中國向韓國為0.20%。美國、日本、韓國向中國的技術輸入比例依次遞減:美國向中國為9.45%、日本向中國為7.75%、韓國向中國為3.97%。
結論及建議
1)全球專利概況:工業機器人領域專利申請始于上世紀60年代,進入2000年以后,隨著研究、應用規模的不斷擴大,全球專利申請正處于新一輪快速上升期。全球專利聚集于中國、日本、美國、韓國、德國五大市場,日本的專利申請人表現為突出。
2)關鍵技術:工業機器人傳感控制技術的發展伴隨著機器人的更新換代,先后經歷了示教再現、伺服控制、智能控制階段。日本是該領域專利產出多的國家,專利技術多集中于傳感控制硬件(設備)、軟件(方法),近年來研發熱點包括移動機器人、多機器人系統控制等。
3)重點產品:焊接、裝配領域機器人應用廣泛。日本、中國分別是焊接機器人和裝配機器人專利申請多的國家。焊接技術的研發熱點包括焊接工藝、焊接附屬設備;裝配技術的研發熱點為機械手控制、機械手周邊設備。
4)中國專利:“中國增長”讓全球工業機器人巨頭把目光投向了中國。中國專利的申請重點與全球保持一致,但在電技術(包括高性能電機、傳感器)領域申請量占比偏少。此外,中國專利申請人以高校和科研院所為主,企業競爭力尚待提升。
歐美、日本等發達國家在其工業機器人產業發展、崛起的過程中,有很多寶貴的經驗值得我們學習和借鑒。首先,政府扶持助力整體產業發展;其次,科學的技術布局是保持核心競爭優勢的重要手段。近年來,我國機器人產業處于市場和政策雙重利好的時期,國家在政策層面上對于機器人產業的扶持力度不斷加碼。在帶領傳統制造業轉型升級的過程中,我國工業機器人企業在加大技術創新力度的同時,更應該重視機器人研發、制造與應用之間的有效銜接,同時利用好專利、標準等技術創新的“保護傘”,在激烈的市場競爭者維護自身權益,不斷積累競爭優勢。
所屬類別: 行業資訊
 ??????????????
?
??????????????
?