

相關知識
機械手的開發與研究
機器人技術融合了多學科技術,涉及范圍廣,在多個領域都有應用,因其取代了人工操作,有效降低了人工作業的強度,并且工作效率大幅度提升,得到多個行業的廣泛關注,掀起了機器人開發和應用的熱潮。機器人應用的范圍與其所具有的操作性能和移動范圍息息相關。機器人手爪是機器人系統的重要組成部分,相當于人的兩只手,主要用于對工具或者工件進行握持和操作,承擔著重要的操作執行功能。機器人技術系統是一個將多種先進技術高度集成的智能化機電系統,具有強大的感知功能、處理功能和執行功能,涉及到自動控制、仿生學、傳感器技術、信息處理技術、材料學等多種學科的專業技術,是現代科學技術發展和進步的集中體現。
1 機器人機械手爪概述
機械手爪主要分為兩部分,即手臂和末端執行器。手臂利用關節的運動帶動末端執行器的動作,達到預定的位置進行預定的操作。末端執行器是搜捕、抓持機構、手爪以及固定手臂末端的工具的集合體,對任務對象做出動作直接進行任務操作。一般來說,機器人機械手爪有五個主要的運動,相應的也就有五個自由度,運動主要包括機器人腰部關節的回轉運動、大臂的前后上下擺動、小臂的擺動、手腕的回轉運動和手腕的擺動。對于機器人機械手爪的張合只是對工件或者物體其道抓握夾持的作用,不屬于自由度,因此不包含在自由度的范圍之內。機械手爪的各個運動利用電機驅動,操作簡單方便而且易于控制。衡量一個機器人機械手爪設計和合理性,主要是以其控制的難易程度、抓取的可靠性、對環境的適應能力、抓取的效率和精準度作為衡量的標準。機器人手爪手指有平動運動和張角運動兩種主要方式,因此對于二指手爪而言可分為兩類,即二指平動手爪和二指張角手爪,從應用范圍來看,以二指平動手爪應用較多,本文著重對二指平動手爪的設計開發進行研究。機器人機械手爪的功能實現程度決定了機器人在實際應用中的工作效率和工作質量,因此對于一個性能良好的機器人來說,首先要有一個性能可靠、抓取動作準確平穩的機械手爪,這就是機器人機械手爪的設計成為關鍵。
2 機器人機械手爪基本結構的設計
在機器人系統中,機械手爪的設計和應用是整個設計工作的重要組成部分,要充分考慮到機器人的設計需求和要達到的效果,以達到設計方案的優化。在對機器人機械手爪的機構進行設計的過程中,要充分的考慮到一下幾點:,手部機構要具有適當的夾緊力,不僅能夠對物品準確的抓握,更要保重物品在被抓握的過程中保持完好,不被損壞;第二,在兩手指之間應該具有充足的移動范圍,當兩手指在張開狀態下能夠滿足物品具有大直徑值;第三,手部機構要具有足夠的剛度和強度,以保證其使用的可靠性;第四,能夠對不同的尺寸進行自適應調節,在抓取物品的過程中能夠自動完成對心;第五,手部機構要靈活,結構緊湊,質量適中。
在滿足以上因素的條件下,制定出機器人設計的整體方案,在重點對手爪機構進行設計,得出初步的設計方案后再根據實際設計需求對方案進行校核分析,對手爪的材料、尺寸、可抓握的大和小直徑進行調整,終確立滿足實際使用需求的手爪設計方案,在此基礎上確立機械手爪的基本結構。如下圖1所示為本文研究的二指平動機械手爪的結構簡圖:
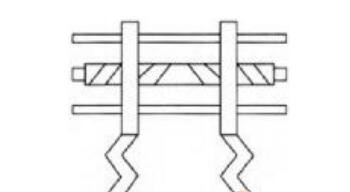
如上圖所示,此二指平動機械手爪為夾持式,通過雙旋向絲杠對二指進行驅動,采用雙導軌進行導向同時起到加固的功能,導軌與絲杠軸心線處于同一水平面上,當手指抓取到物體時沿單軸方向做水平運動,絲杠在電機驅動下轉動,手爪的手指夾鉗通過絲杠螺母與絲杠的連接及雙導軌的導向作用將轉動變為平動,實現二指的開合,并抓取物體。
3 機械手爪的結構參數
本文開發設計的機械手爪擁有平動自由度,可以對小型的圓柱型物品進行準確的抓取。機器人機械手爪抓取范圍是根據需要的功能實現目標來設定的,本文設定手爪抓取直徑范圍在10mm至30mm之間,其手指長度根據工作空間范圍來設定,過長的手指可能會降低手爪的強度,本文涉及的機械手爪長度設定為75mm。本文涉及的機器人接卸手臂在同一個水平面上,因此抓取功能的實現是在這個水平面內準確的抓取物品,在做抓取動作是,為了更好的將允許范圍的物品準確的抓取,機械手爪的鉗口在角度上設定為120度。手爪在抓取物品的過程中當物品的中心點與夾鉗的中心位置偏離時,現有夾鉗的一面預先接觸到物品,在夾鉗面的夾力作用下物品隨著夾鉗的閉合產生運動,再與其它三個立面的逐漸接觸的過程中,互相的角度作用產生兩個軸向的作用力,促使物品的中心位置逐漸與鉗口中心位置相吻合,終達到準確抓取。
4 結語
本文開發設計的機器人機械手抓,結構簡單,操作方便,工作穩定性和可靠性高。V型鉗口可有效的提升抓取物品過程中的自適應力,能完成自動對心,從而提高抓取的穩定性。絲杠傳動具有自鎖功能能夠保證在驅動力突然斷開的情況下仍能對物品穩定的夾緊。工作效率高,雙導軌及直線軸承的使用既保證了工作精度,又增加了傳動效率。
所屬類別: 相關知識
 ??????????????
?
??????????????
?